月への打上げを翌年に控え、HAKUTOのローバー開発もいよいよ大詰め。現在、実際に月面に送り込む「フライトモデル」の製造を進めているところであるが、それと並行して、HAKUTOは鳥取砂丘にてローバーのフィールド試験を行うという。この試験ではどんなことを行うのか、実施担当者であるHAKUTOチームの田中利樹氏に話を聞いた。
日本で月面に似ている場所は…?
今まで本シリーズでは、部品レベルでの環境試験(振動試験、放射線試験、熱真空試験、材料強度試験)についてレポートしてきた。これらの試験結果をローバーの設計にフィードバックし、フライトモデルのデザインが決定されたわけであるが、実際にローバーを組み上げ、本番と似た環境で試してみないと分からないこともある。
そのために実施するのがフィールド試験である。フィールド試験は、なるべく本番と同じ環境で行うのが望ましいが、HAKUTOのローバーが本番で走ることになるのは月面だ。地球上に、そんな都合の良い場所はあるのだろうか?
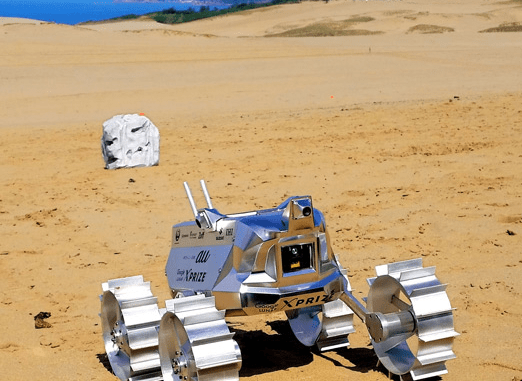
そこで、HAKUTOは鳥取県の連携協力を受け、鳥取砂丘を試験に使用することに決定した。地球上では、さすがに月面の重力などは再現できないものの、砂丘の地形は、見通しの広さや、ゆるやかな傾斜、さえぎる人工物が無いこと、砂の目がある程度細かいことなど、今回の試験に必要な条件がマッチしている。HAKUTOは2014年12月にも、静岡県の中田島砂丘でフィールド試験を行っており、国内でのフィールド試験はこれ以来となる。
今回のフィールド試験では、「カメラ」「通信」「運用」という3項目についてテストを行うという(フライトモデルはまだ完成していないため、実際に運用でフィールドを走らせるのは従来のプリフライトモデル3がベースとなる)。それぞれどんな試験を行うのか、概要を以下に述べよう。
カメラ試験:月面ではどう見えるのか
月面には青空がない。昼間でも空は真っ暗で、太陽だけが眩しく輝いている世界だ。それが、大気により光が散乱し、空が青い地球との大きな違い。このような環境では、たとえ同じカメラを使ったとしても、見え方が大きく変わってくる。
今回のフィールド試験は、太陽の代わりとなる強力なライトを設置し、夜間に実施することで、この月面の光環境を模擬。ここで、可視光カメラと赤外線距離センサーによる見え方を確認する。また比較のために、試験は日中にも行う。
ローバーが月面に行ったあとは、前後左右のカメラの映像を見ながら、ローバーを操縦することになる。何か障害物があった場合には、赤外線距離センサーで検出することができる。月面でどのように見えるのかは、非常に重要なテーマなのだ。
昨年、米国で実施したフィールド試験では、同様の擬似月面環境下において、「障害物が見えにくくなった」(田中氏)のだという。カメラのパラメータをどう変えれば対応できるのか。今回は、その調整のノウハウを蓄積することが主な目的だ。
通信試験:理論と現実に違いはあるか
そしてローバーを安全に操縦し続けるためには、安定した通信が欠かせない。地球と通信できなくなれば、ローバーの状態が分からなくなるし、コマンドも送れなくなってしまう。そうなればもう万事休すだ。安定した通信は、月面での“命綱”と言っていい。
HAKUTOのローバーは、米Astroboticのランダー(着陸船)を経由して、地球と通信する。ランダーが月面での無線基地局となるわけで、ここからローバーが離れれば離れるほど、電波は弱くなってしまう。安全のためにはなるべく着陸船のそばにいる方が良いが、月面探査という観点からすれば、できるだけ遠くまで調べに行きたい。(※1)
どのくらい離れても通信し続けられるのか、まずは電波の特性を把握しておくことが重要だ。これまでは、「二波モデル」と呼ばれるシミュレーションモデルを用いて特性を計算していたのだが、このモデルがどれほど正しいのかは、実際に測定して比べてみないと分からない。今回のフィールド試験では、この検証を行う。
電波特性にはローバーの形状も影響するため、今回の試験ではフライトモデルのモックアップを使用。これに通信機を取り付け、基地局からの距離を変えながら、受信強度を計測していく。なおフライトモデルの通信機は出力が大きく、国内では法的に使えない。今回使うものだと通信距離が短くなってしまうが、モデルの検証という目的に影響はない。
運用試験:リハーサルで手順をチェック
どうしてもハードウェアのように、目に見える部分に注目が集まりがちであるが、Google Lunar XPRIZEで勝つためには、ローバーの操縦も非常に重要なポイントになってくる。HAKUTOの4輪ローバーは構造上、うっかり転倒させてしまっても、月面まで行ってローバーを起こしてくるわけにもいかない。
ローバーの操縦において、田中氏が最も重要だと考えているのは「ミスをしないこと」だという。Google Lunar XPRIZEは競争である以上、Astroboticなどライバルチームより早く動かすことも重要だが、まずは安全が第一になるだろう。
転倒だけは絶対に避けたい。しかし、電波の往復に約3秒もの遅れがある環境でローバーを遠隔操作するのは、決して簡単なことではない。そこで今回のフィールド試験では、擬似的に通信の遅れも考慮した上で、操縦訓練を行う。事前に計画した手順で問題がないか、実際に運用してみて、気づいたことをフィードバックするのが目的だ。
そのためこの試験では、ローバーが見えない場所から運用。本番と同じように、カメラの映像だけでローバーを動かす。なおこの試験も、月面と同じ見え方にするため、夜間に実施する予定とのことだ。
今からでも見学会に参加できる!
フィールド試験は、ローバーの各種試験の中でもかなり大規模なものになる。それだけに事前の準備も大変で、現在はチーム内の雰囲気も「常に緊張感がただよっている」(田中氏)とのことだが、田中氏は実施担当者として、いつも「チームのモチベーション」に気をつけているという。
「みんなでホワイトボードの前に集まり、そこに当日までに何をやるべきか、準備項目を全てリストアップして、それぞれ誰がやるか担当を決めました。やはりみんなで考えて、一致団結していくことが、試験を成功させるのに一番大事だと思います」(田中氏)
今のところ、フィールド試験は9月27日(火)〜29日(木)の3日間で行う予定だ。この最終日となる29日(木)には、HAKUTO SUPPORTERS CLUBのクルー会員・サポーター会員向けに見学会も実施するという(雨天の場合は翌日に順延)。
フィールドを走行するローバーを見られるのは、滅多に無い貴重な機会である。HAKUTO SUPPORTERS CLUBに入会すれば、まだこの見学会に参加することが可能だ。入会後、フィールド試験参加希望で問い合わせをすれば今からでも間に合う。鳥取砂丘での応援をぜひ検討してみてはいかがだろうか。
<試験スケジュール(抜粋)>
9月27日 10時-18時 カメラ、赤外線距離センサーの性能評価(日中)
9月27日 19時-26時 カメラ、赤外線距離センサーの性能評価(月面模擬)
9月28日 10時-18時 無線周波数の特性測定
9月29日 19時-26時 月面光環境模擬下での運用訓練
(天候などにより、スケジュール変更の可能性あり)
HAKUTOチームの田中利樹氏。今回のフィールド試験を担当する
- ※1 2017年1月19日 編集追記:
12月19日付けでAstroboticはGoogle Lunar XPRIZEからリタイアを表明。また12月20日にHAKUTOは新たにTeamIndusと相乗り契約を発表しました。詳細はこちら。
PROFILE
大塚 実 / MINORU OTSUKA
PC・ロボット・宇宙開発などを得意分野とするテクニカルライター。電力会社系システムエンジニアの後、編集者を経てフリーに。最近の主な仕事は「完全図解人工衛星のしくみ事典」「日の丸ロケット進化論」(以上マイナビ)、「人工衛星の”なぜ”を科学する」(アーク出版)、「小惑星探査機「はやぶさ」の超技術」(講談社ブルーバックス)など。宇宙作家クラブに所属。
Comments are closed